◆
フィードバック制御 は、シーケンス制御と並んで、自動制御の双璧です。シーケンス制御については、9.2.(2-A) で解説しました。フィードバック制御については、この お話し でも、コラム 6.3-1で、その概要を、説明しています。また、このホームページの、別の講座「パソコンシミュレーションで体得する 自動制御の基礎と実際」で、詳細に、解説しています。
◆
前記講座の「第 1 章 自動制御とは」は、フィードバック制御(アナログ制御 )についての、要約です(1,1 自動制御とフィードバック制御、1,2 フィードバック制御系の構成、1.3 制御の方式と応答、1.4 各種の制御方式、1.5 アナログ制御とディジタル制御、1.6 アナログ PID 制御の概要、1.7 制御成績の評価)。
◆
簡単に、フィードバック制御について、レビューしたい場合には、上記のページも、参照すると良いでしょう。
ここでは、上記の講座と、重複するところも、ありますが、フィードバック制御について、この講座向きに、やさしく、解説します。
◆
フィードバック制御系の具体例を図 9.2-315 に、示します。図は、温水装置における、温度制御 の例です。
◆ フィードバック制御系の構成を、図 9.2-316 に示します。フィードバック制御系は、信号の流れとして、捕らえることができます(図 9.2-317)。図 9.2-317 は、ブロック図 (ブロックダイアグラム )と呼ばれる形式で、フィードバック制御系を、信号の流れとして、抽象化して示した図です。
◆ 図において、制御対象 は フィードバック制御の対象となる装置です。たとえば、図 9.2-315 における制御対象は、温水装置です。また、モータの制御であれば、制御対象は、モータ(図 9.2-318 の左側)です。コントローラ (図の右側)は 制御装置で、調節計 とも呼ばれています。
[図 9.2-318] 制御対象(モータ)とコントローラの例
◆
制御変数 は、制御対象において フィードバック制御を行う変数です。すなわち、制御変数は、制御によって、ある値にしたい変数です(図 9.2-315 の例では、温水温度です)。操作変数 は、制御のために 操作を行う変数です(図 9.2-315 では水の流量)。操作変数は、その値を変えることによって、制御変数の値を変えることができる能力を、持っていなければ なりません。
◆
ある値にしたい その値を 目標値 (または 設定値 )といいます。制御変数は、目標値と一致していることが理想ですが、実際には、差があります。この差のことを偏差 といいます。コントローラは、この偏差の値をゼロのするためは、操作変数の値を いくら にすれば良いかを、判断 します。
◆
外乱 は、制御変数の値を、変化させてしまう、要因です(図 9.2-319)。
◆
フィードバック制御は、2 種類の使い方が、あります。
一つは、目標値が一定の制御です。放置すれば、図 9.2.319 に示したように、外乱によって、制御変数の値が、変化してしまうのを、制御によって、制御変数を、一定値に保ちます。この使い方を、定値制御 といいます(図 9.2-320)。図は、フィードバックの部分を、省略してあります。
◆
定値制御を必要とするのは、放置すれば、制御変数の値を変化させてしまう 要因があるからです。この制御変数の値を変化させてしまう要因が、外乱 です。
定値制御においては、コントローラは、外乱によって、制御変数の値が変化してしまうのを、操作変数を操作することによって、制御変数の値を一定に保ちます。
定値制御の例を、図 9.2-321 に示します。図で、赤(◇)は外乱、青(▽)は制御無しのときの制御変数、黄(△)は制御を行ったときの制御変数です。
◆
制御無しのときは、制御変数の値(青色)は、外乱(赤色)によって、大きく、変化してしまいます。制御を行ったことによって、制御変数は、外乱が加わっても、最終的には、元の値に戻っています(黄色)。ただし、制御変数の値は、一時的には、変化しています。
自動制御していても、一時的に、僅かの偏差が発生することは、フィードバック制御の、やむをえない性質です。この一時的な偏差を無くすためには、単純なフィードバック制御ではなく、もっと、高度な制御が必要です。
◆
フィードバック制御の、もう一つの使い方が、追値制御 と呼ばれる方式です。追値制御では、目標値が、変化します。制御変数は、この変化する目標値を追いかけて、偏差がゼロになるように、制御されます(図 9.2-322)。図は、目標値が、一定速度で、変化する場合の、追値制御です。この例では、目標値が変化している間、ほぼ一定値の偏差が、継続的に、発生しています。
◆ 追値制御のことを、サーボ とも言います。サーボとは、召使のことです(上図下側)。召使が主人の指図どうりに働くことから、追値制御のことを、サーボと名付けたものです。
◆ 偏差をゼロにするための判断 のことを、制御演算式 (制御アルゴリズム )といいます。この制御演算式は、簡単なものから、複雑なものまで、いろいろあります。制御演算式の優劣によって、制御成績 が、異なってきます。しかし、制御成績は、制御演算式だけから、決まるのでは、ありません。制御対象の特性が、制御成績に大きく影響します(図 9.2-323)。
◆
制御が容易な制御対象は、単純な制御演算式でも、十分に良い制御を行うことが、できます。これに対して、制御が難しい制御対象では、高度な制御演算式を使用しても、制御成績を、希望する値に収められないことが、あります。
◆
より良い制御を実現するためには、制御対象ごとに、その制御対象の特性にマッチする制御演算式を選ぶのが、理想的です。しかし、実用上、これは煩雑すぎます。
幸いなことに、多くの制御対象に対して、一応は満足できる、制御演算式が存在します。この制御演算式を、PID 制御 と呼んでいます。
◆
とくに優れた制御が要求されるときや、制御が難しい制御対象を除いては、多くの場合に、この PID 制御が使われています。
この PID 制御を含み、基本的な、制御演算式を、紹介して おきましょう。
◆ 最も単純な制御演算式は、オンオフ制御 と呼ばれるものです。オンオフ制御の操作変数は、2 値変数 (2 値ディジタルの変数)です。制御変数の値が、目標値よりも大きいか、小さいかによって、操作変数は、オン か オフ かの どちらか になります(図 9.2-324)。
◆
オンオフ制御の名は、スイッチのオン(閉) / オフ(開) による制御に由来します。
オンオフ制御は、簡単なことが特徴です。とくに、操作部が、スイッチのときは、オンオフ制御が適しています。
図 9.2-325 は、オンオフ制御による、制御応答の例です。
◆
オンオフ制御は、制御変数の値が、目標値を過ぎる毎に、操作変数の値が、オンとオフとの値に、繰り返して、変わります。このため、制御変数は、図に示したように、振動します。このような、制御に起因する振動のことを、ハンチング と呼んでいます。オンオフ制御では、ハンチングを無くすことは できません。
◆
しかし、ハンチングの振幅が、許容される範囲内であれば、オンオフ制御は、十分に、実用になります。オンオフ制御は、簡単なことが特徴です。とくに、操作部がスイッチのときは、オンオフ制御が適しています。
◆
ハンチングの振動の振幅の大きさが、問題になるときは、オンオフ制御を、使用することが、できません。振動の振幅が、どの程度なら許容されるかは、制御対象によって、異なります。
◆
ハンチングの振幅が、許容値をオーバーするときの、対策として、操作変数の値を、両極端ではなく、中間の値(図の青色)を取るという、方法があります(図 9.2-326)。図の水色は、オンオフ制御のときの値です。
◆
操作変数が、2 値を取る制御は、その 2 値が、たとえば図に示したように、0 % と 100 % とに対応していなくても、オンオフ制御の名で呼ばれています。
◆
ただし、当然の話ですが、操作変数の適正値が、オン時の操作変数の値と、オフ時の操作変数の値との、中間で無ければなりません(たとえば図 9.2-326 の緑線)。操作変数の適正値が、この範囲から外れると、うまく制御することは、できません。
◆
操作変数の振幅を小さくすれば、ハンチングの振幅は、小さくなります。しかし、外乱の大きさが大きいと、大きな外乱には、対応できずに、制御不能になります。操作変数の振幅は、この兼ね合いによって、決める必要が、あります。
◆ 振動の振幅を減らし、かつ、大きな外乱にも、対応できるようにする方法として、操作変数の値を、多段にするという方法があります(図 9.2-327)。これを、多段制御 (多位置制御 )といいます。
◆
多段制御において、外乱の大きさが、小さいときは、操作変数の変化は小さいですが、外乱が大きいときは、操作変数の変化が大きくなり、偏差も大きくなります。
◆
しかし、多くのシステムでは、定常時には、外乱が小さいことが多く、非定常時にのみ、外乱が大きくなります。定常時には、外乱が小さいので、図 9.2-327 の、X と Y との間で動作します。ハンチングの幅は、小さくて済みます。
◆
非定常時の、大きな外乱が入ったときには、操作変数が大きく変化して、大きな外乱に、対応します。このときの偏差は、外乱の大きさに対応して、大きくなります。
◆
前記の多段制御を、さらに進めると、比例制御になります。比例制御 (比例動作 、P 動作 )では、操作変数は、連続に変化する、アナログ量です(図 9.2-328)。
前節で述べた制御では、制御変数はアナログ量ですが、操作変数は、飛び飛びのディジタル量でした。この比例制御では、制御変数と共に、操作変数もアナログ量です。
◆
この意味で、アナログ制御 と呼ばれます。ただし、アナログ制御は、比例制御を含み、さらに広い範囲の制御方式を指します。
アナログ制御の代表例である、比例制御は、図から分かるように、偏差と操作変数とは、比例(直線)関係にあります。
◆ アナログ制御では、操作変数が、連続的に、滑らかに変化します。したがって、ハンチングを起こさないで済む可能性があります。図 9.2-329 は、時刻ゼロのタイミングで、目標値をステップ状に変化させたときの、比例制御の制御応答です。
◆
比例制御では、図に示したように、最初は、若干振動的になる場合がありますが、適切に調整されていれば、最終的には、振動の無い、一定値に落ち着かせることが、できます。
比例制御の、制御演算式は、操作変数を y、偏差を e とすれば、
y = Kp e + Km ・ ・ ・ (9.2.1)
となります。ここで、Kp と Km は、定数で、図 9.2-328 に示したものです。
◆
図 9.329 で、制御変数は、一定値に落ち着いていますが、その値は、目標値と一致していません。この目標値との、定常的な差(図の d )のことを、オフセット (残留偏差 )といいます。比例制御では、オフセットをゼロにすることは、できません。
◆
さらに高度な、オフセットを無くすことができる、制御演算式が、あります。積分動作と呼ばれるものですが、これについては、後述します。
◆ 自動制御には、前記のアナログ制御と、ディジタル制御とが、あります(図 9.2-330)。
◆
通常は、フィードバック制御の、制御対象は、アナログのシステムです。アナログ制御 では、制御対象、制御演算式など、すべてが、アナログです。
ディジタル制御 においても、その制御対象、したがって制御変数は、一般に、アナログです。制御変数が、アナログであっても、制御演算式が、ディジタルであれば、ディジタル制御と、呼んでいます。
◆
制御変数がアナログの場合には、ディジタル制御を行うためには、アナログの制御変数を、アナログ ディジタル変換(A/D 変換)して、ディジタル化します(図 9.2-331)。ディジタル化した信号を、コントローラに入力し、ディジタルで制御演算を行った後に、ディジタル アナログ変換(D/A 変換)して、操作部に出力します。
◆
図で、マイコン、ソフトウェアとあります。ディジタル制御は、制御演算式が、ディジタルであれば、それを実現するための装置が、何であっても、ディジタル制御です。しかし、ディジタル演算に、マイコンによるソフトウェアを利用することが多いので、それを、例にしてあります。
◆
アナログ制御とディジタル制御との違いは、制御信号 にアナログ信号を使用しているか、ディジタル信号を利用しているかの違いです。アナログ信号は、連続な信号です。これに対して、ディジタル信号は、飛び飛びの、非連続な信号です。この連続であるか、非連続であるか、ということが、制御に大きく、影響しているのです(図 9.2-332)。
◆
図の上側は、アナログ量が、値として連続である。すなわち繋がっていて切れ目が無い、ということを示しています。繋がっていて切れ目が無い、ということは、どこで切っても、そこには値がある、ということです。これに対して、ディジタル値は、値と値との間は、無限に近いのですが、切れ目があります。
◆ 図の下側は、時間的な性質を示しています。アナログ値は、時間的に見ても、切れ目がありません。これに対して、ディジタル値は、時間軸で眺めても、間が空いています。
◆
アナログ制御とディジタル制御とでは、制御性が異なります。この制御性の違いは、実は、信号がアナログ値で表されているか、ディジタル値で表現されているか、ではなく、信号が連続であるか、非連続であるか、ということが、原因なのです。
アナログ信号は、空間的(変数軸)にも、時間的にも、連続です。これに対して、ディジタル信号は、空間、時間の どちらをとっても、非連続です。
◆
制御対象の多くは、アナログのシステムです。したがって、制御対象それ自体は、連続です。ディジタル制御では、この連続な制御対象から、サンプリング によって、飛び飛びの非連続量として、情報を取り出します。
◆
サンプリングを行うと、サンプリングによって、得られる情報量が減少します。サンプリングは飛び飛びですから、途中の情報が失われてしまいます(図 9.2-333)。図は、サンプリング周期が粗すぎると、時間的に途中の情報が失われてしまう、ということを、示しています。
◆
信号の大きさについても、量子化が粗いと、詳細な値の変化情報が、失われます。
サンプリングによって、制御に必要な情報が失われれば、制御成績が低下します。図 9.2-334 は、ステップ応答における、サンプリング周波数の違いによる、制御応答の差を示したものです。十分なサンプリングを行っている、黄色(△)に対して、青(▽)は、サンプリング周波数 が、低いために、応答が遅くなっています。
応答の速さは、フィードバック制御の、性能評価の重要な指標です。
◆
サンプリング周波数が高すぎても、制御成績の低下はありません。しかし、サンプリング周波数を高くするには、それを実現するためのハードウェアを必要とします。ハードウェアコストに影響が無いならば、サンプリング周波数が高いことは、何も、問題は、ありません。
しかし、一般には、サンプリング周波数を高くするためには、それに対応するハードウェアを必要としますから、その分、コストアップになります。コストアップになるような、無駄なサンプリングは、無くすことが、必要です。
◆
サンプリング周波数が、適正であるかどうかを、判定するのが、サンプリング定理です(図 9.2-335 )。図は、サンプリング定理 ギリギリ のサンプリング周波数で、サンプリングしたときの様子です。サンプリング周波数と同じ周波数の信号は、サンプリングによって、失われていないことが、わかります。
◆
サンプリング定理に違反して、サンプリング定理よりも、低い周波数で、サンプリングすると、元の信号の情報は、失われてしまいます。
単に情報が、無くなってしまうだけなら、まだ まし なのですが、もっと、いやな現象が起こります(図 9.2-336)。本来存在しない、ニセの情報(エイリアス)が発生して、そのニセの信号を、掴まされてしまうのです。この、エイリアスの信号は、図に示すように、元の信号の周波数よりも、低い周波数の信号です。
◆
フィードバック制御においては、このエイリアスに だまされて、これを元にして、制御を行ってしまいます。この結果として、制御を乱してしまいます。
エイリアスの波形は、元の波形の周波数と、サンプリング周波数との、相対的な関係によって異なります。図 9.337 は、エイリアス波形の例です。各々の図の下側が、エイリアスの波形です。
◆ エイリアスは、好ましくない現象ですから、サンプリング定理を、満たすように、サンプリング周波数を、設定することが、必要です。具体的には、元の波形の、少なくとも、2 倍の周波数でサンプリングします。
◆
実際の制御において、エイリアスのために、制御を乱された例を、示します。同じ制御対象をアナログ制御したときと、ディジタル制御したときに、エイリアスが発生すると、制御応答が、悪くなります。
この制御対象は、図 9.2-338 に示す、流量制御系 です。ポンプ で、液を加圧し、ポンプの吐出側に調節弁を入れて、流量を制御しています。
◆ 調節弁 (コントロールバルブ )は、自動制御において、流量 を操作変数にしたときに、使用する弁です(図 9.2-339)。流量とは、物質の流れにおいて、流れている量のことです。電気における、電流に相当する量です。

◆
電流を I、電圧を V、電気抵抗を R とすれば、V = R I となります。同様に、物質の流れにおいて、流量を F、圧力を Pとすれば、
P = RF F
となります。ここで、RF は、流体抵抗です。ただし、電圧、電流、電気抵抗は、線形ですが、流体では、線形の範囲もありますが、一般には、線形では、ありません(コラム 2.1-6 参照)。
◆
流路が狭いほど、流体抵抗は、大きくなります。すなわち、流路を絞れば、流体抵抗が大きくなります。
絞りを可変にして、流量をオンオフしたり、流量の値を制御できるようにしたものが、弁 (バルブ )です(図 9.2-340)。

◆
バルブについては、コラム 9.2-20 を参照してください。
図 3.339 の調節弁は、空気圧のアクチュエータで動作する、調節弁です。調節弁は、このほか、油圧式や、電動式のものも あります。
◆
さて、エイリアスを、具体例によって説明します。
図 9.2-338 の流量制御系においては、ポンプの回転に伴う、流量の、高周波の変動があります([注] 参照)。図 9.2-341 は、この流量制御系に、アナログ制御を適用したときの、制御応答です。上側の PV は、制御変数で、下側 の出力は、操作変数です。時間の、ほぼ中央で、PV が変化しています。これは、目標値を、ステップ状に変化させたものです。
◆
流量は、約 1.3 秒の周期で変動しています。この変動は、ポンプの回転に伴う変動です。この高周波の変動は、この流量制御系で制御して 無くすことが できません。周波数が高すぎて、調節弁による操作が、追い付けないからです。
◆
しかし、このような高周波の変動は、制御システムにとって、障害になりませんから、放置してあります。もっと、低い周波数の外乱に対しては、この流量制御系が働いて、正常に制御してくれます。このシステムは、これで十分です。
[注] 一般に、高周波 / 低周波は、相対的なものであり、絶対的なものでは、ありません。電子の分野においては、高周波といえば、少なくとも、MHz、通常は、GHz 以上のオーダーを想定します。オーディオであれば、数 kHz は、高周波でしょう。これに対して、プロセス制御においては、秒のオーダーでも、高周波です。
◆ この同じ制御対象で、コントローラだけを、アナログ制御からディジタル制御に置き換える実験を行いました(図 9.2-342)。図は、サンプリング周期 0.5 秒です。流量の変動周期は、1.3 秒ですから、サンプリング定理に違反していません。したがって、アナログ制御(図 9.2-341)と、ほぼ、同等に制御されています。
[図 9.2-342] ディジタル制御(サンプリング周期 0.5秒)
◆ 図 9.2-343 は、ディジタル制御で、サンプリング周期を、1 秒に変更したときの応答です。このサンプリング周期は、サンプリング定理に違反しています。したがって、エイリアスが、観測されます。図を見ると、ハンチングが発生しています。このハンチングは、エイリアスが原因です。
[図 9.2-343] ディジタル制御(サンプリング周期 1 秒)
◆ ただし、エイリアスは、制御対象の特性に対して、サンプリング周波数を十分に速くすれば、解決する問題です。特別な場合を除いては、サンプリング周波数を早くすることは、難しい問題では、ありません。
★ バルブ には、2 つの意味があります。ひとつは、BULB で、球根、電球、真空管などのことで、球形のものを いいます。球根栽培で代表的なものは、チューリップでしょう。


★ もう一つは、VALVE で、弁の意味です。単語も、発音も異なりますが、カナ書すると、同じです。
★ このバルブ(弁)には、2 つの用途があります。一つは、電子回路のスイッチに対応するものです。もう一つは、流量を制御するバルブで、電子回路における、ポテンショメータのような、可変抵抗器 に相当するものです。
★ 前者、すなわち、スイッチに対応するバルブの、代表的な機種が、ゲートバルブと呼ばれるものです。ゲートバルブ (仕切り弁 )は、全開時には、流路が配管と ほぼ等しくなり、バルブを挿入したことによる、圧力損失は、ほとんど ありません。
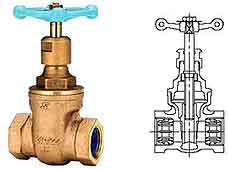
★ ダム の水門 も、ゲートバルブの名で呼ばれています。規模と形状が異なりますが、原理は、普通のゲートバルブと同じです。

★ 流量を制御するバルブの、代表例が、グローブバルブ (球形弁 )です。グローブバルブは、全開しても、圧力損失を、無視できません。
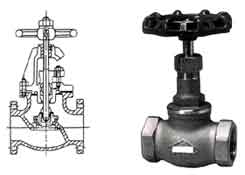
★ グローブバルブよりも、さらに、流量制御を、きめ細かに行うことができきるのが、ニードルバルブ です。基本的な構造は、グローブバルブと、同じですが、ディスク (円盤)の部分が、針状に なっており、バルブの絞りの面積、したがって流量を、より細かに調整することが、できます。下図の例では、ディスクは、針のようには尖っていませんが、上図のグローブバルブと比べれば、尖っています。

★ 調節弁は、アクチュエータの種類と、バルブの形式(ゲートバルブ、グローブバルブなど)との組み合わせによって、各種のものが、あります。本文の、図 9.2-339 に示したものは、アクチュエータに、空気圧式のダイヤフラムを使用しています。
★ 下図左側で、空気圧は、上部から加えます。ダイヤフラム (隔膜 )に掛かる空気圧と、スプリングとのバランスによって、ダイヤフラムが上下し、バルブのステム (軸)の(上下の)位置が決まります。したがって、バルブの開度が決まります。
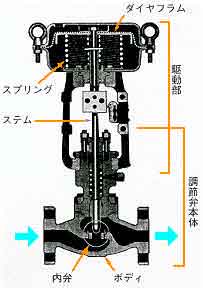

★ 調節弁のアクチュエータは、空気圧式ダイヤフラムのほかに、油圧式、電動式などが、あります。上図右側は、電動式調節弁です。
![]()
![]()
![]()