◆
電子機器 には、多くの種類が、あります。この電子機器の多くは、マイコンを内蔵しています。この意味では、マイコン応用製品です。マイコンを内蔵しては、いますが、(マイコン)組み込み機器 と呼ばれ、コンピュータであることを、意識することなく、利用することが、できます。
自動制御を行う、制御機器 (制御装置、コントローラ )も、ほとんどが、マイコン組み込み製品です。
◆
自動制御は、制御のやり方によって、大きく、2 つに分けることが、できます(図 9.2-169)。シーケンス制御と、フィードバック制御です。
◆
シーケンス制御の例を、図 9.2-170 に示します。シーケンス制御 とは、機械装置に行わせる動作と、その順序とを、制御装置に記憶させておいて、その一連の動作を、自動的に行わせる、制御です。
◆
図において、ステップ 1 で、お金を投入することによって、シーケンス制御がスタートします。以下、ステップ 6 まで、自動的に行われます。
◆
これに対して、フィードバック制御 は、温度制御 を例にとると、図 9.2-171 のような制御です。
水をヒータで加熱します。この加熱された温水の温度を、温度センサで計り、その温度が一定になるように、ヒータの電流を加減します。このヒータ電流値の操作が、自動的に行われます。
◆
シーケンス制御は、次の 4 種類の基本的な制御方式を、組み合わせることによって、実現します。
・ 順序制御
・ 条件制御
・ 時限制御
・ 計数制御
◆
(1) 順序制御
順序制御 は、定められた順序で、機器を動かす制御です(図 9.2-172)。ステップ制御 とも呼ばれています。
◆
図 9.2-170 の洗車機の制御での「お金を入れスタートボタンを押す」→「水洗いスタート」→「洗剤により水アカ取り」→「モップでの洗浄」・・・の流れは、この順序制御に、よるものです。一般的に機械は、必ず、何らかの動作順序が、決まっています。機械のシーケンス制御では、動作の流れを、この順序制御で決めます。
そして、どのような条件で動くか、止まるかということは、次に述べる条件制御で決めます。
◆
(2) 条件制御
条件制御 とは、制御対象の状態信号や、完了信号を組み合わせて、定められた条件が成立したとき、機器を動作させる、制御のことです(図 9.2-173)。条件制御は、所定の条件(たとえば、リミットスイッチがオンになっているかどうか)を調べて この条件が成立しているか否か によって、操作方法を、変えます(下側の図)。
この制御は、必要なときに機器を動作させ、不要な時に機器が動作しないように、する制御です。このことから、インターロック制御 とも、呼ばれています。
◆
図 9.2-170 の洗車機の制御では、「お金投入を検出」と「スタートボタンが押されている」の 2 つの状態の AND で、「水洗いが開始」されます。この制御は、条件制御の例です。
図に示すように、条件制御においては、制御装置と制御対象の間に、ループが形成されます。
◆
(3) 時限制御
時限制御 は、制御対象への動作指令が、時刻や時間で決まる制御です(図 9.2-174)。図 9.2-170 の洗車機の制御では、「最初の水洗い」を、たとえば 3 分間行ない、終了後に、次のステップ 3 に進むことが、時限制御です。時限制御には、タイマー機能が必要です。
タイマー (タイムスイッチ )とは、時刻や時間によって動作するスイッチです(タイマーについての詳細は、[ここ]をクリックしてください。戻るときは、ブラウザ上部の戻るをクリックしてください)。
◆
(4) 計数制御
計数制御 は、製品個数や機械動作回数などを計数して、その計数値によって、制御対象への動作を決める制御です(図 9.2-175)。計数制御ではカウンタ機能が必要です。
◆
シーケンス制御のシーケンスは、順序論理です。シーケンスは、順序論理回路で、構成することが、できます。実際の回路は、組み合わせ論理と順序論理とを、総合した回路になります。したがって、シーケンス制御の設計は、先ず、シーケンスの論理設計を行い、次いで、設計された論理を実現する回路設計を行います。
論理設計と、回路設計の、一般的なことについては、5.2.(3) を参照してください。
◆
シーケンス制御回路には、従来は、リレー回路が使われてきました。そのリレーは、当初は、接点のリレーが用いられましたが、信頼性と寸法の点から、無接点のソリッドステートリレーに変わりました。
◆
シーケンス制御、とくに大規模なシーケンスの場合には、リレーは、小形のソリッドステートリレーを使ったとしても、寸法が大きくなります。リレーで、シーケンス回路を組む代わりに、専用のシーケンス制御装置があります。単純なシーケンスの場合などを除いては、シーケンス制御装置 (シーケンサ 、プログラマブルコントローラ 、PLC )を利用するのが、便利です(図.9.2-176)。

◆
プログラマブルコントローラは、マイコン製品ですから、シーケンスは、ソフトウェアで書かれます。このソフトウェアは、シーケンス制御専用の言語で書かれています。シーケンスの作成、追加、変更に、柔軟に対応することが、できます。
◆
PLC は、従来は、PC と呼ばれていました。しかし、PC は、最近では、パソコンの意味で多く使用されています。このため、シーケンス制御装置は、パソコンと混同しないように、PLC と呼ぶことに統一されました。
◆
シーケンス制御だけでなく、シーケンス制御以外の処理が多い場合には、シーケンス制御に、マイコンやパソコンも、使用されています。
◆
上述のように、シーケンス制御は、従来は、リレーを使用したロジックが、多く使われてきました。シーケンス制御の設計を行う技術者は、リレーに慣れているいる人が多いのです。この人たちにとっては、シーケンスを記述するのに、リレー回路で示す方が、便利です。
◆
この理由から、PLC のプログラムは、リレー回路で表現する方式のものが、多いのです。この表現形式を、ラダー方式 といいます(図 9.2-177)。
◆
しかし、逆に、はじめてシーケンス制御に接する人にとっては、回路設計技術者なら、論理図記号の形が分かり易いでしょう。ソフトウェア技術者なら、コンピュータのプログラム(コーディングシート または フローチャート)に似た形式のものが、分かり易いことになります。
コンピュータのプログラム言語に似た形式で記述する、シーケンス制御言語 も、あります(詳細は、[ここ]をクリックしてください。戻るときは、ブラウザ上部の「戻る」を使用してください)。
◆ シーケンス制御と、似たものに、モーションコントロールがあります。モーションコントロール は、アクチュエータの、高度な運動制御技術の総称です(図9.2-178)。図は、モーションコントローラ で、右側は、ボードタイプです。圧延機、鉄道車両、エレベータ、電気自動車、工作機械、ロボット、磁気ディスクなど、モータを使って機械を動かすシステムにおいて、これらの機械を、いかにうまく動かすかということが、モーションコントロールの技術です。


◆ モーションコントロールは、身近なところでは、携帯電話による、ゴルフのスウィング練習に、使われています。携帯電話には、地磁気と重力とを基準として、身体のバランスや動きを検知する、モーションコントロールセンサ が組み込まれています。 携帯電話を、ゴルフのクラブの代わりにして振ると、モーションコントロールセンサで携帯電話の動きを検出し、それに基づいて、ボールの飛びをシミュレーションして、ディスプレイします(図 9.2-179)。

◆ 彫刻機 も、モーションコントロール応用製品です。ソフトウェアによって、任意の彫刻を行うことができます(図 9.2-180)。

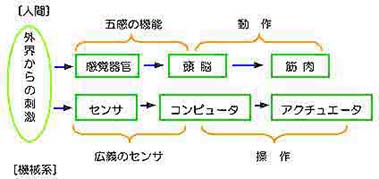
★ 人は、5 感に感じます。人の 5 感は、(視覚、聴覚、触覚、嗅覚、味覚)の 5 つです。第 6 感もありますが、これは、別物です。
★ センサは、人の五感を人工的に実現しようと、言うものです。この、センサ は、千差万別 と、もじって呼ばれるほど、種類が多くあります。

★ いろいろなものが、多数集まると、ネットワークを作ります。センサが作るネットワークを、センサーネットワーク といいます。ただし、一口に、センサーネットワークといっても、その目的用途、規模は、様々です。
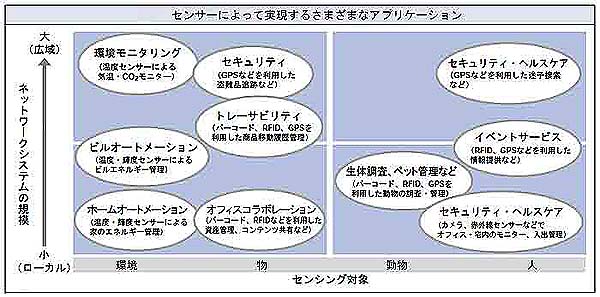
★ 下図は、広域のセンサーネットワークの例です。
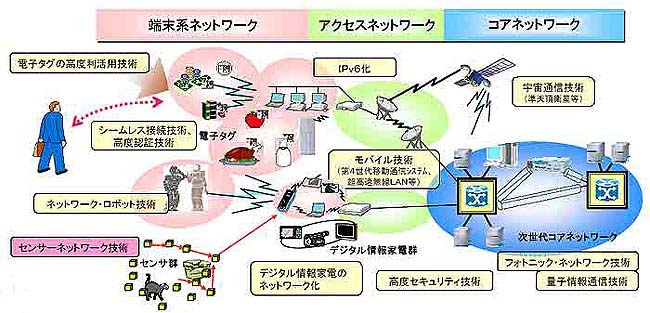
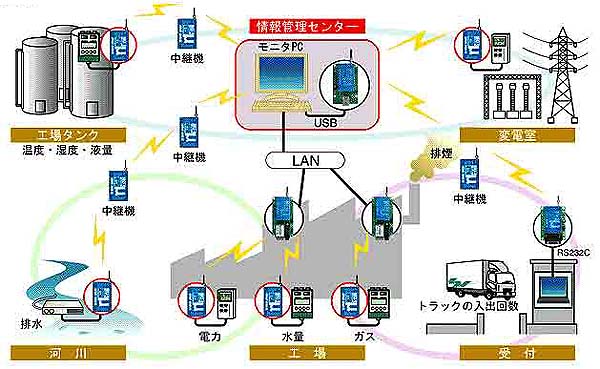
★ 下図は、センサーネットワークを含む、広域ネットワーク の例です。
★ 下図は、家庭における、ホームネットワーク です。ホームネットワークには、センサーネットワークが、含まれています。
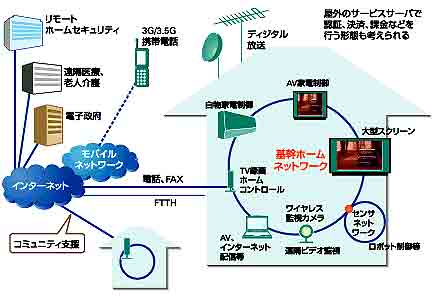
★ ホームネットワークで、とくに重要なのは、セキュリティです。図で、ZigBee は、ジグビーです。

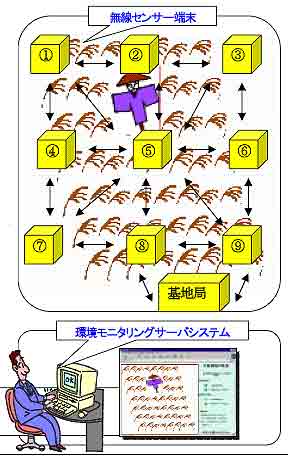
★ これは、農業における環境モニタリングシステム です。このシステムでは、センサーネットワークは、ワイヤレスになっています。
★ 監視システム も、センサーネットワークの応用例です。
★ センサーネットワークでは、アドホックネットワークが、よく用いられます。
![]()
![]()
![]()