
◆ 反射を無くす手段として、終端は簡単で優れた方法です。しかし、その副作用もあります。
薬は、病気を治す作用があります。しかし、作用のあるところには、必ず副作用が伴います。副作用は無くすことはできませんが、できるだけ作用の効果を大きくして、副作用を減らすように、服用します。
同様に、有効な回路にも、副作用があるのです。
◆ さて、終端における副作用は何でしょうか。それは、何らかの意味で損失を伴うということです。
開放端に終端抵抗を挿入すれば、挿入してなかったときにはゼロであった電流が流れます。これがパワーの損失になります(図.12)。
◆ ドライバ側に終端抵抗を入れたとき、そこに電流が流れれば電圧降下が起こります。すなわち、電圧の降下という損失と、それに伴うパワーの損失があります(図.13)。
◆ 完全な終端は、両側共に適正に終端されている状態です。
両側共に開放端のときに、これを両側終端 すると、図.14になります。
◆ この場合は、伝送路の途中のどこかにドライバがあります。ドライバからの出力電流は、両端の抵抗に共に流れますから、次に示すドライバ/レシーバ系の終端に比べて、電流は 2 倍になります。
◆ 次にドライバレシーバ系を図.15 に示します。
◆ 負荷側の終端抵抗に電流が流れます。したがって、ドライバ側の終端で、電圧降下が発生します。ドライバ側の終端は、ドライバの出力インピーダンスと終端抵抗との合成値で、伝送路の特性インピーダンスの値と等しいはずです。したがって、終端による電圧降下と伝送路への出力電圧とは等しく、信号源電圧の 1/2 です。
◆ すなわち、ドライバ/レシーバ系における損失は、伝送路への出力電圧が信号源電圧の 1/2 になること、および両方の終端抵抗におけるパワーの損失です。
◆ 終端は常に完全(すなわち両端)でなけばならないということはありません。それで支障が無いならば、片側終端 でも十分です。図.4 の B シリーズ CMOM の場合は、片側どころか両端とも無終端です。それでもこの場合は問題がありません。
◆ 片側終端で差し支えないケースの代表例が、リンギングの防止です。リンギングは、既に説明したように、両端における反射の結果、信号が伝送路を何回も往復することが原因です。したがって、リンギングを防止するためには、どちらか 1 端を終端してやれば、リンギングは無くなります。
◆ ドライバ側のみ終端 して、レシーバ側開放の場合を図.16 に示します。
◆ この波形は、シミュレーション波形です(ノイズ対策 6 図.16 の再掲)。このシミュレーションの伝送路は、損失がゼロの理想化された伝送路です。
伝送路入口の波形(V(IN))の最初の部分は、終端による電圧降下のために、信号源電圧の 1/2 になっています。終端抵抗と伝送路の特性インピーダンスから決まる電流が流れるからです。その後、信号源電圧に等しくなってています。これは反射波が戻ってきて加算されたからです。
◆ 定常状態では、レシーバ端が開放ですから、伝送路には電流は流れないので、電圧降下は起こりません。
この方式の特徴は、負荷が開放なので、伝送路には定常電流が流れないことです。このため、信号電圧は、全体を通して信号源電圧に等しくなります。そして、パワーの損失という形の副作用はありません。
◆ 副作用は、レシーバ側の端を除いては、過渡的な波形が存在することです。また、レシーバ側がハイインピーダンスだということは、ノイズ対して弱いという欠点があります(ノイズ対策 1.(3-E-b))。
◆ レシーバ側のみ終端 の場合はどうでしょうか(図.17)。
◆ これも、シミュレーション波形です(ノイズ対策 6 図.17 再掲)。ここのドライバは、出力インピーダンスがゼロの理想化されたドライバです。したがって、信号源電圧が電圧降下無しに、伝送路に供給されます。図の上側 ドライバ側の波形は、V(1) と V(IN) とが完全に重なっているため、緑色が見えなくなっています。
◆ この方式では、伝送路を通ってレシーバ側の終端抵抗に電流が流れます。したがってパワーの損失があります。ただし、減衰無しの理想化された伝送路なので、レシーバ側の電圧は、信号源と同じです。
結果として、パワーの損失があるという欠点がある代わりに、ドライバ側のみ終端において存在した、過渡的な波形歪と、ノイズに弱いという問題が無くなっています。
◆ リンギングを無くし、あるいは軽減することは、終端すること以外にも、方法があります。それは、信号の立ち上がり/立下り速度を遅くすることです。このことは、既に3.1.(1-B) に示しました。
信号の立ち上がり/立下りを遅くしたときの応答については、ノイズ対策 6.(3) を参照してください。
◆ 以上見てきたように、反射を完全に無くすためには両側終端を必要とし、定常的に電流が流れます。片側終端においてもレシーバ側終端では、電流を必要とします。終端抵抗の値は、伝送路の特性インピーダンスと同じですから、50〜100 Ω 程度です。電源電圧は、一般に 3〜5 V ですから、ドライバは、30〜100 mA の電流駆動能力が必要です。
◆ この仕様を広くカバーできる汎用的な IC として、ペリフェラル ドライバ IC があります。最近の高速汎用 IC は、ある程度まで上記の仕様をカバーしますが、完全にはカバーしません。IC にこだわらなければ、トランジスタで回路を組んでも差し支えありません。
◆ 図.18 は、ペリフェラル ドライバ IC による実験波形です。
[注] ツイストペアケーブルは、伝送を行うのに優れた性質を持っています。フラットケーブルは、機器内部の配線には便利ですが、伝送上の特性が劣ります。ここは距離が長いので、ツイストペアケーブルを使用します。なお、ケーブルに関する解説は、4. の伝送用ケーブルのところで行う予定です。
◆ ペリフェラル ドライバ IC の出力は、オープンコレクタです。したがって、プルアップ を必要とします。ただし、図.c34 とは異なり、もう 1 本の抵抗がグラウンドに接続されています。これをプルダウン といいます。すなわちこの場所は。プルアップ/プルダウン方式になっています(レシーバ側も同様)。
[注] 単なるプルアップではなく、プルアップ/プルダウン方式になっているのは、TTL の特性を利用して、パワーを節約する回路となっているからです。しかし、最近はほとんど使用されないと思いますから、説明は省略します。
◆ さて、伝送距離 100m のときの伝送波形を見ると、リンギングは全く無く、きれいな波形です。終端することが、大きな効果を発揮することが分かります。
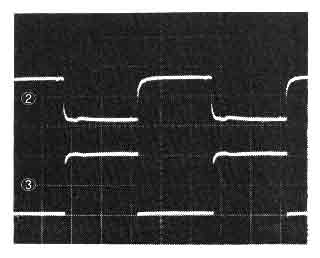
◆ 伝送距離を 300m に延ばして見ます(図.19)。
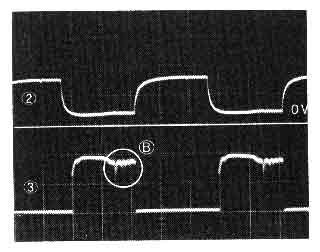
◆ 伝送波形自体(2)は、きれいなのですが、その波形を受けたレシーバの出力(3)は、図の(B)に示したように、波形が怪しくなっています。この原因は、伝送路における電圧降下のために、レシーバのスレッショルド電圧ぎりぎりになってしまったことにあります。
以上のように、伝送距離が長くなると、伝送路による信号の減衰を無視できなくなります。
◆ なお、伝送路の特性インピーダンスは、純抵抗と見なせますが、伝送路それ自体は、抵抗のみと見なすことはできません。伝送路は、キャパシタンス分や、インダクタンス分も含んでいます。このため、伝送路の減衰量 は周波数特性を持ちます(図.20)。
◆ この図は、伝送路の入力と出力との特性の概要を示したものです。具体的な周波数特性をあらわしたものではありません。
周波数特性は、ボード線図 と呼ばれる形式で表してあります。ボード線図では、横軸は、周波数で対数目盛になっています。縦軸は、入力と出力の振幅比で、単位は dB です。dB はそれ自体が対数ですから、ボード線図は、両対数目盛です。
◆ dB で表した振幅比のことを、ゲイン といいます。伝送路の周波数特性は、周波数が十分低い範囲では、ゲインが 1 定値です(図の水平の部分)。しかし、周波数が高くなると、減衰が大きくなります。
◆ さて、ドライバ出力は、パルス波形です。パルス波形とは、1.3.図.13 に示したような方形波のことです。立ち上がり/立下り時間は、理想的にはゼロです。この理想的なパルス波形では、立ち上がり/立下りの部分は周波数が無限大の成分を持っています。
◆ パルス波形が伝送路を通過すると、伝送路の周波数特性のために、高い周波数成分が減衰します。高い周波数成分が減衰すると、パルス波形の角の部分が丸くなります。この減衰が激しくなるほど、角の丸みが大きくなり、立ち上がり/立下りが緩やかになります。
◆ 伝送距離が長くなると、伝送路の減衰が増加します。この減衰の増加は、図.20 の周波数特性から分かるように、周波数が高くなるにつれて、より激しくなります。したがって、伝送距離が長いほど、信号の角の丸みや、立ち上がり/立下りは、より緩やかになります。
図.18 の伝送距離 100m と図.19 の伝送距離 300m の波形(2)を比較してみてください。このことが分かります。
[注] 周波数特性と、その評価の手法については、「自動制御講座」その中で主に 3.1.1. に解説されています。なお、周波数特性のことを、自動制御の分野では、周波数応答と呼んでいます。
◆ 最近は、回路の高速動作が進んでいます。伝送路はキャパシタンスを持っていますから、高速動作させるためには、電流駆動能力が要求されます。また、高速化すれば、短距離でもリンギングが問題になります(1.1.図.5)。基板内においても、終端を必要とする場所が出てきます。終端に耐える電流が必要です。
◆ この両方の要求から、高速用の汎用 IC は、高い電流駆動を持つようになっています。これらの IC を使用することによって、終端付きの回路を構成することができます(表.1)
| 種類 | ファミリー |
電源電圧 (V) |
動作速度 (ns) |
駆動電流 (mA) |
| バイポーラ | AS | 4.5〜5.5 | 4.0 | 64 |
| F | 4.5〜5.5 | 4.0 | 64 | |
| (LS) | 4.5〜4.5 | 12 | 24 | |
| BICMOS | ABT | 4.5〜5.5 | 2.5 | 64 |
| BCT | 4.5〜5.5 | 4.0 | 64 | |
| CMOS | LVT | 2.7〜3.6 | 2.5 | 64 |
| ALVT | 2.3〜3.7 | 1.5 | 64 | |
| (HC) | 2.0〜6.0 | 14 | 8 |
◆ この表は、保証値ではありません。駆動電流は、むしろ最大値と考えた方が良いでしょう。立ち上がりと立下り、その他各種条件により異なります。個々のデータシートで確認する必要があります。
動作速度は、立ち上がり/立下り時間ではなく、入力パルスから出力パルスまでの遅れ時間ですが、立ち上がり/立下りは、これに比例的と考えられます。
◆ 種類のバイポーラは、TTLを含み、さらに広い範囲の名前です。「BICMOS」は、バイポーラの高速性とCMOS の低消費電力とを兼ね備える素子として開発されたものです。その後 CMOS でも高速なものが出ています。
◆ 以上、汎用 IC を利用した、データの伝送について概観してきました。しかし、汎用 IC が実用できるのは、短距離です。長距離の伝送はできません。また、耐ノイズ性が低いという問題があります。
汎用 IC 利用には、限界があります。長距離、さらには高速長距離に対応するためには、伝送用のドライバ/レシーバを使用する必要があります。