◆ 一般に、反射は好ましくない現象です。反射による悪影響を無くす必要があります。
対策としては、反射それ自体を無くす方法と、反射があっても、これを無視できる条件で使用する方法(6.(3)参照)との 2 通りがあります。
反射を無くすことは、案外簡単です。
下流側に、伝送路を接続するときには、特性インピーダンスが等しい伝送路を、接続します。ケーブルの種類が異なっていても、特性インピーダンスの等しいものを接続すれば、反射は起こりません。
伝送路の端において、反射を無くすためには、伝送路の特性インピーダンスと等しいインピーダンスを持つ素子を、伝送路の端に接続します。これによって、あたかも等しい伝送路が続いているの同じになります。
すなわち、反射を無くすことができます。
◆ 幸いなことに、ケーブルの特性インピーダンスは、キャパシタンス分やインダクタンス分を含まない、純抵抗です。したがって、伝送路の特性インピーダンスに等しい値の抵抗を使用すれば良い訳です(図.9)。
この、伝送路の端につなぐ抵抗を、終端抵抗 といい、伝送路の端終端抵抗を取り付けることを終端 すると呼んでいます。このときは、伝送路から送られてきた電力は、この終端抵抗によって、100% 消費されます。
◆ 適正に終端すれば、反射が無くなりますから、図.10のようになります(実際の波形は、伝送3.1.(3-A)図.9 です)。
◆ なお、特性インピーダンスの値が等しい伝送路を、接続したときに、接続個所のインピーダンスが、伝送路の特性インピーダンスと異なると、それが原因で反射が発生します。反射を完全に防ぐためには、コネクタ等のインピーダンスも、伝送路の特性インピーダンスと等しいものを使うことが必要です。
また、ケーブルの品質が悪く、むらがあると、特性インピーダンスが、ケーブルの場所によって異なりま。インピーダンスが異なれば、反射が起こります。ただし、むらがあるという程度の特性インピーダンスの違いでは、反射による波形ひずみは僅かです。
しかし、反射があるということは、その分が相手に届きませんから、損失になります。すなわち、損失が大きいケーブルであるという、結果を招きます。
◆ 以上のように、伝送路の端がオープンのときは、終端することによって、端における反射を無くすことができます。
端がオープンでなくても、負荷のインピーダンスが伝送路の特性インピーダンスよりも大きいときも、終端抵抗を設置することによって、反射を無くすことができます。
ただし、端のインピーダンスと終端抵抗との並列合成が、伝送路の特性インピーダンスと等しくなるようにします(図.11)。
◆ ここで、RL : 負荷インピーダンス、RT : 終端抵抗、RC : 伝送路の特性インピーダンスです。
また、記号 // は、抵抗(またはインピーダンス)の並列合成記号 です。この記号は、数学記号ではありませんが、数学記号と同様に取り扱うことができ、一般の数学記号に混ぜて使うことができます。数学記号の+と同等に取り扱います。 R1//R2 = (R1・R2) / (R1 + R2) です。
伝送路の端には、ドライバやレシーバを取り付けることが多いのですが、レシーバの入力インピーダンスは、一般にハイインピーダンスです。この例のようにして、反射を防ぎます。
これに対して、ドライバの出力インピーダンスは、通常伝送路の特性インピーダンスよりも、ローインピーダンスです。伝送路の端を故意にショートすることはありませんが、ドライバの出力インピーダンスが十分に低いときは、近似的にショートしたのと同等です。
◆ ドライバ(信号源)がローインピーダンスのときは、信号源と直列に終端抵抗 RT を設けます(図.12)。
◆ ここで、RS : 信号源インピーダンス、RT : 終端抵抗、RC : 伝送路の特性インピーダンスです。
◆ 伝送路では、ドライバとレシーバが組になって、伝送路の両端に接続されることが多いのです。この場合について調べてみます(図.13(a))。
◆ ドライバ/レシーバ系(図(a))の等価回路は、図(b)となります。信号源は、理想信号源です。理想信号源のインピーダンスはゼロです。RLDはドライバの出力インピーダンス(抵抗)、RLRはレシーバの入力インピーダンス(抵抗)です。通常は、伝送路の特性インピーダンスRCに対して、
RLD < RC
RLR ≧ RC
です。
この条件のときの、適正な終端は、既に説明したように、ドライバ側は直列終端、レシーバ側は並列終端となります。適正に終端した場合のドライバ/レシーバ系の等価回路は、図(c)です。
ただし、RCD、RCRは、適正に終端した、終端抵抗です。
ドライバの出力インピーダンスは、通常は、伝送路の特性ンピーダンスに比べて、十分に小さな値です。
◆ しかしドライバの中には、出力インピーダンスがかなり高く、伝送路の特性インピーダンスに近い値を持ったものも、あります。この場合には、終端しなくても、反射は十分小さくなります。
また、さらに、出力インピーダンスが、伝送路の特性インピーダンスよりも、はるかに高いものもあります。この場合は、反射は起こりますが、その反射の影響が、無視できる条件になります。
出力インピーダンスが高いと、信号の立ち上がり速度が遅くなります。このことが、反射の影響を無視できる条件になるからです(6.(3)参照)。
先に示した、図 7、図 8および図 10は、一端(伝送路の出口側)における反射を示した図です。したがって、他端(入り口側)は、無限遠という条件です。
実は、これらの波形は、ドライバ側を適正に終端して無反射とたときの波形だったのです。これによって、無限に長い伝送路から、信号が伝わってきたときと同じ状態を作り出していた訳です。
そして、レシーバ側の終端条件を変えて作った波形です。
◆ ドライバ側、レシーバ側を共に反射が起こる条件にしたときは、どうなるでしょうか。
無終端であれば、通常、ドライバ側はローインピーダンス、レシーバ側はハイインピーダンスですから、この条件になります。なお、ドライバの出力波形は、パルスではなく、ステップ状の波形です(図.14)。
◆ 図.14は、ドライバのインピーダンス : 10Ω、レシーバのインピーダンス : 1kΩです。また、V(1)はドライバの信号源、V(IN)はドライバの出力インピーダンス(RLD)通過後=伝送路入り口、V(OUT)は伝送路出口=レシーバ入力(RLR入り口)の、電圧です(図.13参照)。
図から分かるように、波形が振動しています。この振動は、伝送路の両端で反射が起こる結果、信号が伝送路を何回も往復していることが原因です。
ドライバの出力インピーダンスダンス(RLD)が低いので、RLD の両端に発生する電圧が低く、V(IN)の振幅は、あまり大きくはありません。
しかし、レシーバの入力インピーダンス(RLR)は、かなり大きいので、V(OUT)は、大きな振幅です。問題になるのは、レシーバの入り口ですから、非常に嫌な現象です。
また、振動の周波数が高いと、放射ノイズが多く発生しますから、この点でも好ましくありません。
この、ドライバ/レシーバ系で発生する振動を、リンギング と呼んでいます。リンギングの周期は、信号が伝送路を往復する時間の2倍です(信号の速度は6.(1-A)参照)。
いま、伝送路が20cmだとすると、リンギングの周期は4ns、したがって周波数は250MHzです。高速ディジタル回路では、ちょうど問題になる周波数です。
◆ 極端な場合、すなわち、ドライバ側インピーダンスがゼロ、レシーバ側が無限大のときのリンギングを、図 15に示します。
完全に発振しています。ドライバ側は、出力インピーダンスがゼロですから、リンギングは見えません。
◆ 次に両端共に適正に終端されたときを調べて見ましょう(図.16)。
[図.16] ドライバ/レシーバ系の応答波形(両側適正終端)
◆ ドライバ側の出力インピーダンスが、伝送路の特性インピーダンスと同じですから、信号源電圧V(1)に対して、伝送路の入り口電圧V(IN)は、1/2になっています。適正に終端するということは、反射をなくことに有効ですが、その反面、出力電圧が低くなります。
レシーバの負荷は100Ωですから、伝送路および負荷には、10mAの電流が流れているはずです。
◆ ドライバ側を適正終端、レシーバ側をオープンのときを図.17に、ドライバ側の出力インピーダンスをゼロ、レシーバ側を適正終端した場合を図.18に示します。
[図.17] ドライバ/レシーバ系の応答波形(ドライバ側適正終端)
[図.18] ドライバ/レシーバ系の応答波形(レシーバ側適正終端)
◆ どちらか一方を適正終端すれば、反射は1回だけですから、リンギングは発生しません。そして、伝送路出口=レシーバ側は、両方とも、きれいな波形なっています。
すなわち、リンギングを防止し、レシーバ側でのノイズを無くすためであれば、どちらか一方を適正終端すれば十分です。
図.17は、図 7と同じ条件です。図 7で、一見レシーバ側で信号が増幅されているように見えました。
実は、図.7 も、信号源は2Vであったのです。それがドライバの出力インピーダンスで、電圧降下して、伝送路には、1Vの信号が送出されます。このとき、電流は10mA流れています。
信号が伝送路の端に到着すると、レシーバの入力インピーダンスは無限大ですから、電流は流れません。したがって定常状態では、伝送路にも電流は流れません。図.17 のように、全体が2Vになります。図.7は、信号が短いパルスなので、定常状態では無いときの波形です。信号源が 2V ですから、V(OUT) に 2V が現れることは、不思議ではありません。
◆ 図.18では、ドライバ側にも波形歪みがありません。
レシーバ側は、適正終端されていますから、反射は起こりません。
ドライバ側は、反射が発生する条件です。しかしレシーバ側から信号がきませんから、反射は、起こりません。結果として反射は全くありません。
図には、伝送路の途中は、示されていませんが、伝送路全体を通して、波形は、きれいです。
図.17では、最初にレシーバ側で反射が発生します。しかし、ドライバ側は無反射の条件ですから、反射は最初の1回だけです。
反射の点では、図 18の方が優れています。しかし、レシーバ側の負荷に電流が流れます。省エネの立場では、図17の方式が勝っています。したがって、目的、用途によって使い分けます。
◆ 伝送路の反射を無くすためには、終端が必要です。しかし一般の回路では、ほとんどが、終端無しで使用しています。反射の影響が無視できれば、反射があっても差し支えないからです。ここでは、反射の影響が無視できる条件を探ります。
これまで、信号は、立ち上がりがステップ状、すなわち、立ち上げり速度が、極めて速い場合を、取り扱ってきました。信号の立ち上がりが遅いと、どうなるのでしょうか。
終端条件は、省エネの立場から、レシーバ側はオープンであるとして、検討します。実際にはレシーバ自身のインピーダンスがありますが、通常は十分に大きく、近似的に、オープンと見なすことができます。
ドライバ側の終端によって、リンギングの状態を加減して見ます。
◆ まず、ドライバ側を適正終端した場合を考えます(図.19)。この条件では、リンギングは発生しません。
◆ 図において、信号が伝送路通過する時間を Tt として、
緑 : 立ち上がり 10ns (十分速い)
赤 : 立ち上がり 7.5μs (=1/2 Tt)
青 : 立ち上がり 15μs (=Tt)
黄 : 立ち上がり 30μs (=2Tt)
桃 : 立ち上がり 60μs (=4Tt)
です。
何れの場合も、反射があり、それによって波形は変化しています。
しかし、信号の立ち上がりが、信号が伝送路を往復時間に等しいとき(黄色)は、波形は歪んでいないように見えます。
◆ また、信号の立ち上がりがそれ以上のときは、波形は歪んで見えますが、その歪み方は穏やかで、目立ちません。
以上から、次のことが成立します。
信号の立ち上がり時間が、信号が伝送路を往復する時間または、それよりも長いときは、信号は歪みますが、その歪みは目立ちません。すなわち、ひずみを無視できる条件です。
◆ 次に、リンギングが発生する条件を調べて見ます(図.20)。
◆ 図において、
緑 : 立ち上がり 10ns (十分速い)
赤 : 立ち上がり 15μs (=Tt)
青 : 立ち上がり 30μs (=2Tt)
黄 : 立ち上がり 60μs (=4Tt)
桃 : 立ち上がり 120μs (=8Tt)
です。
リンギングが発生する条件では、信号の立ち上がりを遅くしても、リンギングが無くなる条件はありません。
しかし、信号の立ち上がりが、信号が伝送路を2往復する時間または、それよりも長いときは、リンギングの振幅が大幅に小さくなります。
◆ したがって、リンギングが発生する条件においては、
信号の立ち上がり時間が、信号が伝送路を往復する時間の2倍または、それよりも長いときは、リンギングは無くなリませんが、その振幅が十分に小さくなります。すなわち、リンギングを無視することができます。
次に、リンギングの程度を変えてケーススタディを行ないます。図.21は信号の立ち上がりが十分に速いときです。
◆ 信号源インピーダンスを Rt として、
緑 : Rt ≒ 0
赤 : Rt = 3
青 : Rt = 10
黄 : Rt = 50
です。
信号源インピーダンスが、適正終端の条件に近づくと、リンギングは小さくなります。
◆ 図.22は信号の立ち上がりが、信号が伝送路を2往復する時間、すなわちリンギングの振幅が十分小さくなる条件での波形です。
◆ 信号源インピーダンスは、図.21と同じです。
どの条件でも、振幅は十分に小さくなっています。
◆ 以上から、リンギングは、信号の立ち上がり速度に大きく依存していることが分かります。
一般に、高速なほどリンギングが大きいと言われています。しかし、リンギングの大きさは、上記の結果から分かるように、信号の周波数には依存しません。
ただし、信号の周波数を高くするためには、高速の素子を必要とします。高速の素子は、信号の立ち上がりが速い素子です。
したがって、結果として周波数が高いほど、リンギングが激しくなる傾向にあります。
信号の立ち上がり速度を、必要以上に高くすることは好ましくありません。信号の周波数に見合う程度に、立ち上がり速度を抑えることが、ノイズ対策上、有効です。
◆ 使用する素子は、大(高速)は小(低速)を兼ねません。
また、適切な立ち上がり速度の素子が無く、高速の素子を使用するときは、フィルタをいれて、立ちあがり速度を制限することが有効です。
なお、リンギング対策用のフィルタは、一般のフィルタとは異なった特性のものが必要です(13.(3-C))。
★ リンギングの最も普通の意味は、ベルがリンリンとなることです。電話呼び出し音が鳴っていることにも、使われています。最近では、電話の呼び出し音は、ベルでは、ありません。電子音が使われており、特定のメロディを使用するものも、多くなっています。リンギングは、元々は、教会などの鐘が、鳴り響くという意味です。



★ さて、本題のリンギングですが、本文では、シミュレーションの波形だけですので、実際の波形を示します。図で、ダンピング抵抗とあるのは、ドライバ側の終端抵抗のことです。この伝送路の特性インピーダンスは 50 Ω ですから、ダンピング抵抗 51 Ω は、適正終端です。
★ リンギングは、2 次元の画像でも発生します。下図左の 2 つの写真は、その例です。2 つのうちの左側は、元画像で、その右は、リンギングが発生した画像です。


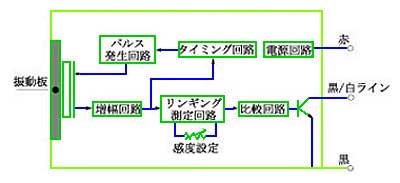
★ リンギングは、悪いことばかりでは、ありません。役に立つ場合もあります。上図右は、粉体や粒体のレベルセンサで、その回路は、下図のとおりです。センサ表面の振動板に、パルス発生回路によってパルスが与えられます。そのパルスのエッジのところに、リンギングが発生します。
振動板に粉粒体が、接触していないときは、リンギングが、ある時間継続します。振動板に粉粒体が接触しているときは、リンギングが直ちに減衰します。リンギングの継続時間によって、粉粒体を、検出することができます。