
◆ ネットワーク伝送(
インターネットワークを含む)では、ネットワークに多数のデバイスが接続されています。接続の相手が固定しているシステムもありますが、より汎用性が高いのは、交換機能をもち、接続相手を切り替えることができるシステムです。
交換 のやり方は、色々あります。大別すると、図.16 のようになります。図の N はノードです。
◆ 集中交換方式は、電話の交換機 に代表される方式です。回線は交換機に集められ、交換機で交換を行います。
分散交換方式では、交換機は存在せず、交換機能は、各ノードの共同作業によって実現します。LANでは、従来ほとんどが分散交換方式でしたが、最近は集中交換方式が多くなっています。
インターネットワークでは、交換機能は、階層化されています。異なった交換方式が混在することもあります。
◆ 1 回線で、同時に複数のデータを送る伝送のやり方を、多重伝送 といいます(図.17)。ただし、データをやり取りする相手が固定されていますから、交換とは呼んでいません。
[注] 多重伝送については、7.1. でさらに詳しく解説する予定です。
◆ 多重化
の方法には、
空間分割多重化 、
周波数分割多重化 (周波数多重化 ともいいます)、時分割多重化 (タイムシェアリング ともいいます)の 3 種類があります。
しかし、空間分割多重化は、単に線を束ね、または多芯ケーブルを使用するだけです。上記の定義「1 回線で」には当てはまりませんし、通常、多重伝送とは呼んでいません。
◆ ブロードでは、末端部分を除いては、多くが時分割多重化による多重伝送が使用されています。時分割多重化は、ディジタルデータの伝送に適した方式です (図.18)。
◆ 図では、送信データ 1〜3 の 3 つのデータを多重化して送っています。図のように、1、2、3 と繰り返すことから、サイクリック伝送 とも呼ばれています。
データ伝送速度は、高速化が進んでいます。各々が必要とする伝送速度の 100倍の伝送速度を有する伝送回線であれば、100 回線を多重化することができます。
◆ ブロードの幹線では、光ファイバ伝送 が多く使用されています。幹線の光ファイバ伝送では、時分割多重化に加えて、さらに、波長多重化 が使用されています。
[注] 周波数と波長は、 逆数関係にありますが、同じことを表します。電波では周波数で、光では波長を使用する習慣があります。
◆ すなわち、波長多重化された各波長の一つ一つが、それぞれ、さらに時分割多重化されています。
ローカルでも、幹線部分は、時分割多重化が使用されています。
◆ また、上記とは別に、工場現場などで、接点のオン/オフ情報などを送る、簡易多重伝送 が使用されています。一般に、時分割多重伝送が利用されています。
多重伝送は、バス方式にモディファイすることができます。複数のデバイスが、共用する線状の伝送路のことを、バス といいます。バス方式の、親子式ローカル簡易多重伝送の例を、図.19 に示します。
◆ 現場の各所に散在する、オン/オフ情報 (1 ビットの情報) を集めたり、オンオフの制御情報を分配するのに使用します。
同様の目的で用いられ、中央がコンピュータ (マイコンを含む) ときは、単純多重ではなく、コンピュータが所定の点を切り替えて入出力します。すなわちコンピュータインターフェースは交換機能を持ちます(図.20)。
◆ マイクロコンピュータ (マイコン ) の基本構成を、図.21に示します。
◆ コンピュータバス は、コンピュータ本体 (図.20ではマイクロプロセッサ) と、そのコンピュータ本体とデータのやり取りをする複数の相手 (図.21では、メモリ、入力/出力インターフェース) との間を結ぶ、共用の伝送路です。
◆ コンピュータバスは、通常は、プリント基板 内、または複数のプリント基板をつなぐためのマザーボード 内に、敷設されます。パソコンのマザーボードの例を図.22に示します。
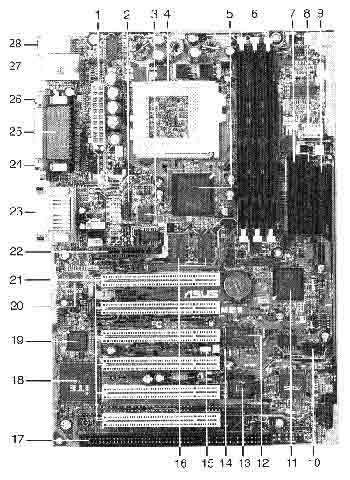
◆ 純粋のマザーボードは、基板を挿入するコネクタと、基板間をつなぐバスとから成ります。図.22 に示したパソコンのマザーボードは、純粋のマザーボーではなく、汎用の基板と、それに接続する各種の入出力用基板を搭載するマザーボードとを兼ねた基板です。
図の 4 は、コンピュータ本体 (CPU) 用のソケットです。図の 21 が、各種入出力用基板を挿入するコネクタで、このコネクタをコンピュータバスが繋いでいます。
◆ コンピュータバスは、寸法的に小規模であり、並列伝送なので、一般のネットワーク伝送とは異なります。しかし、親 (コンピュータバスでは、コンピュータ本体) がバスを制御する、親子式バス の代表例です。コンピュータバスの構成を、図.23 に示します。
◆ 図の CPU が、コンピュータの本体部分です。CPU は、バスを制御して、複数のデバイス (メモリや I/O) とデータのやり取りをします。デバイスを識別するために、各デバイスにはアドレスが付いています。
バスは、データのやり取りをするデータバス 、アドレスを指定するアドレスバス 、および制御信号を伝えるコントロールバス の、3 種類から成ります。
[注] デバイス (DEVICE)は、通常「装置」と訳しますが、装置よりも小規模なもの、例えば、プリント基板、さらには IC なども、デバイスと呼びます。
◆ コンピュータバスのデータやり取にりは、各種の方式がありますが、基本的な、データやり取りのタイムチャートを、図.24 に示します。

◆ 上側は、CPU からデバイスにデータを送り込む場合で、送リ側(CPU)主の同期非確認方式です。
下側は、CPUがデバイスからデータを取り込む場合で、受け側(CPU)主の同期非確認方式です。
CPU はアドレスバスによってデバイスのアドレスを指定します。そして、指定されたアドレスと一致するデバイスだけが、CPU に応答します。
◆ 実際のコンピュータバスは、一般にもっと複雑です。パソコン用のバスとして、代表的なものに、PCI バスと呼ばれるものがあります。パソコン以外のマイコン用バスとしても広く使用されています。
広く普及したバスでは、そのバスに使用する各種の入出力や周辺装置用のボードが市販されており、それらを利用することができます。
◆ バスにおいては、ドライバは、3 ステート出力 、または、オープン コレクタ出力 と呼ばれる素子を、使用する必要があります (コラム.2.3 参照)。
★ 一般のディジタル IC では、1 つの出力を、複数で受けることはできますが、複数の出力を、合流させることはできません(図.c31(a))。
★ IC の内部回路は、トランジスタ回路 ですが、トランジスタの働きを、スイッチの形で模型的に示すと、出力の相互接続は、図.c32のようになります。
★ 一般の IC の出力は、ハイとローの2つの状態があります。IC の出力は、2 つのスイッチで表されます。
電源側のスイッチがオン、グラウンド側のスイッチがオフのときは、出力がハイです。電源側のスイッチがオフ、グラウンド側のスイッチがオンのときは出力はローです。
図では、2 つの出力が接続されています。一方の出力がハイ、他方の出力がローになったとき、電源とグラウンドがショートして、IC を破壊してしまいます。
★ このような状態を避け、バスがうまく動作するように作られたドライバが、3 ステート ドライバ です(図.c33)。

★ 通常のハイ、ロー (図の左 2 つ) の他に、ハイ
インピーダンスの状態 (両方のスイッチが共にオフの状態) があります。通常の IC の出力が、ハイとローの 2 つの状態を取るのに対して、第 3 の状態(ハイインピーダンス )があるので、3 つのステート(状態)の名が付いています。
★ ハイインピーダンス状態のときを非アクティブ 、ハイまたはローを出力している状態をアクティブ といいます。IC には、入力端子、出力端子の他に、制御端子があります。制御端子で、アクティブ/非アクティブの制御を行います。
バスに接続されたドライバは、常時は、非アクティブ、すなわちハイインピーダンスにしておきます。そして、動作させるときだけ、アクティブにします。アクティブなドライバは、1 個またはゼロで、複数個にすることはありません。
★ 3 ステート ドライバと同様に使用できるのが、オープンコレクタ ドライバ です(図.c34)。3 ステート ドライバが 無かった時代に使われたものです。現在では、3 ステートが主流です。
★ トランジスタ (図ではスイッチ) は、IC に内蔵されています。抵抗と、その電源は外付けです。
トランジスタ(スイッチ)がオフのときは、抵抗を介して電源が出力されるので、出力はハイになります。トランジスタ(スイッチ)がオンのときは、出力がトランジスタ(スイッチ)によってグラウンドにショートされるので、出力はローになります。
★ このように抵抗を電源に接続することによって、電圧をハイにすることを、プルアップ といい、この抵抗のことをプルアップ抵抗 と呼びます。
★ レシーバは、ノイズに強くするために、シュミットトリガ と呼ばれる特性を持った IC を使用します。